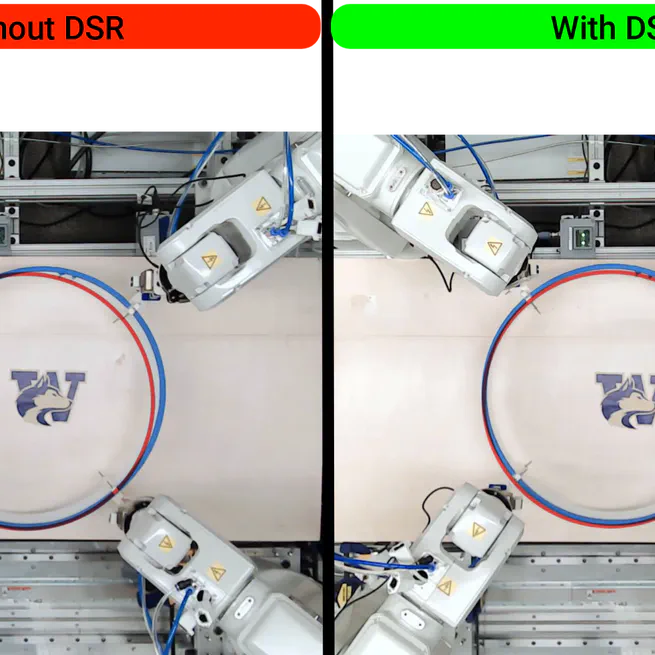
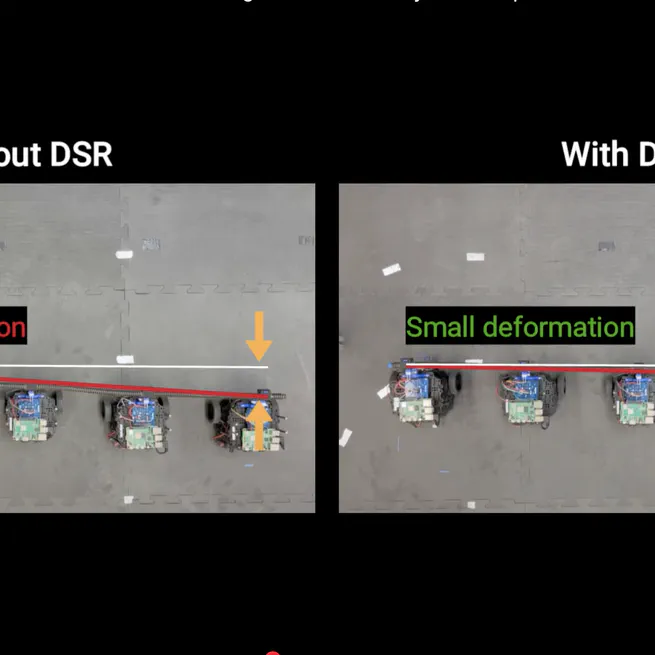
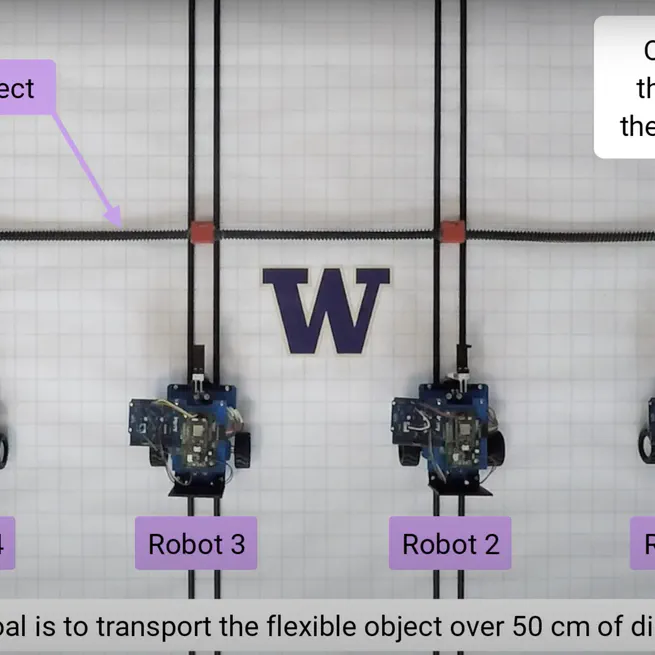
Delayed Self-Reinforcement to Reduce Deformation During Decentralized Flexible-Object Transport
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example.
Dec 1, 2024
Communication-Free Decentralized Controller Design for Flexible Object Transport
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example.
Jun 4, 2024

Data-Based Stiffness Estimation for Control of Robot–Workpiece Elastic Interactions
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example.
Jul 1, 2023
Accelerated-Gradient-Based Flexible-Object Transport With Decentralized Robot Teams
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example.
Nov 6, 2020

Data-Based Learning for Control of Elastic Interactions Between Robot and Workpiece
This work is driven by the results in my previous paper on LLMs. Create your slides in Markdown - click the Slides button to check out the example. Add the publication’s full text or supplementary notes here.
Oct 8, 2019