About Me
Hi there! I am Yoshua, a robotics enthusiast and an engineer by training. I earned my Ph.D. in Mechanical Engineering, specializing in robotics and controls, from the University of Washington in Seattle, WA USA. My doctoral research was conducted under the guidance of Professor Santosh Devasia in the Precision Controls Laboratory. My research interests lie in the control of multi-robot teams, robotics applications in manufacturing and machine learning. My long-term vision is to foster seamless collaboration between humans and robots.
Currently, I’m building Konstruksi.AI, a technology startup dedicated to providing AI-based solutions for real-time project monitoring tailored to the construction industry.
In my free time, I’m also hosting the Ekskul Podcast, a podcast platform aimed at sharing the stories and experiences of Papuan scholars and students, allowing listeners to gain insight and inspiration from their journeys. It also serves as a space to capture the aspirations and paths of Papuan youth in their efforts to return and contribute to Papua and Indonesia.
- Robotics
- Controls
- AI & Machine Learning
PhD Mechanical Engineering
University of Washington, USA
MS Mechanical Engineering
University of Washington, USA
BS Mechanical Engineering
Oregon Institute of Technology, USA
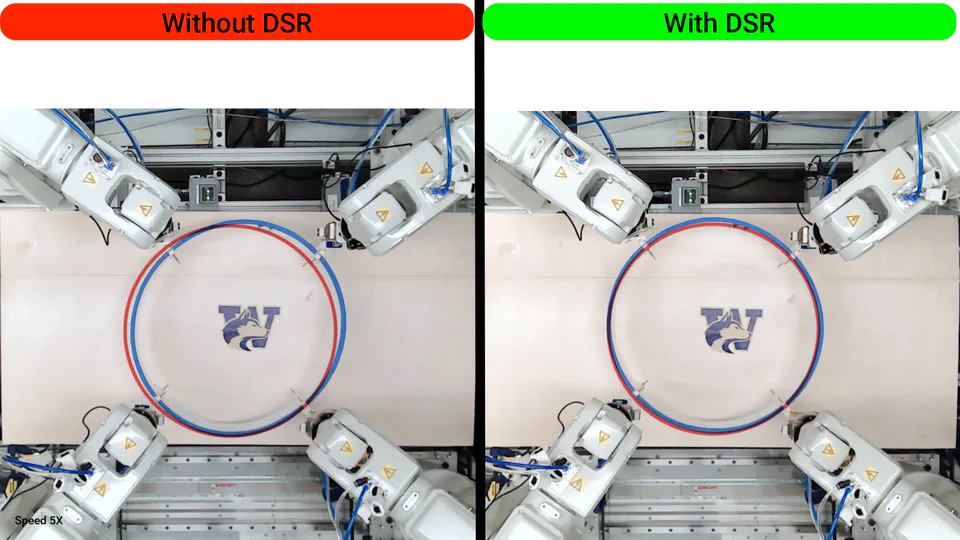
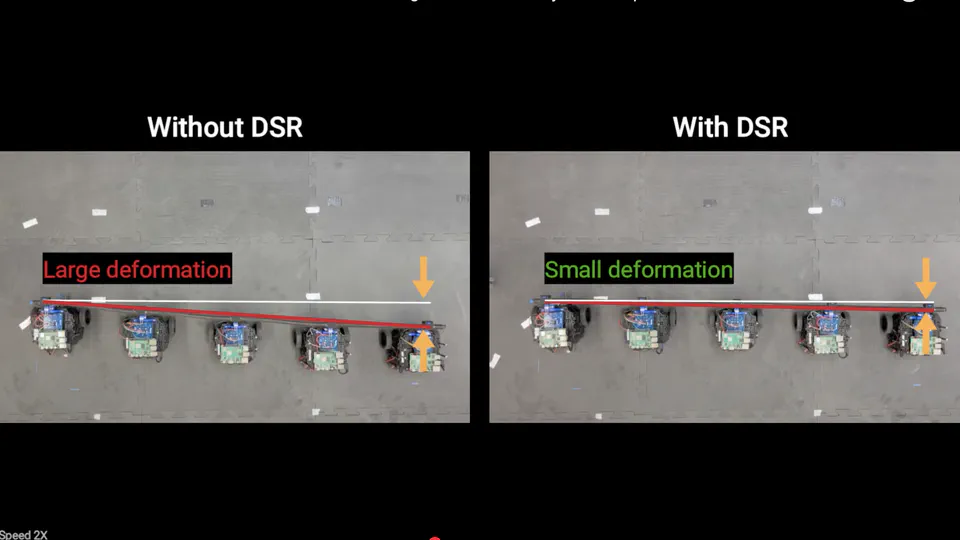
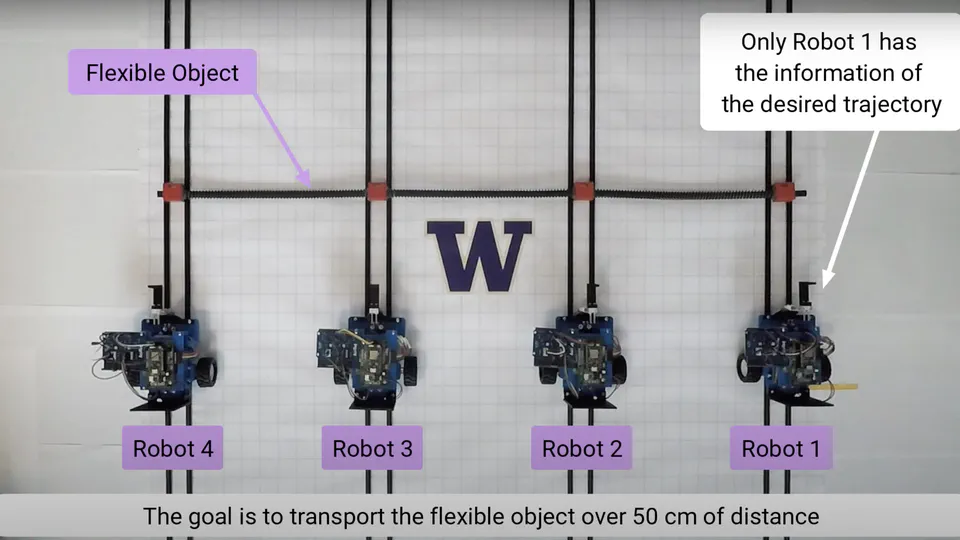
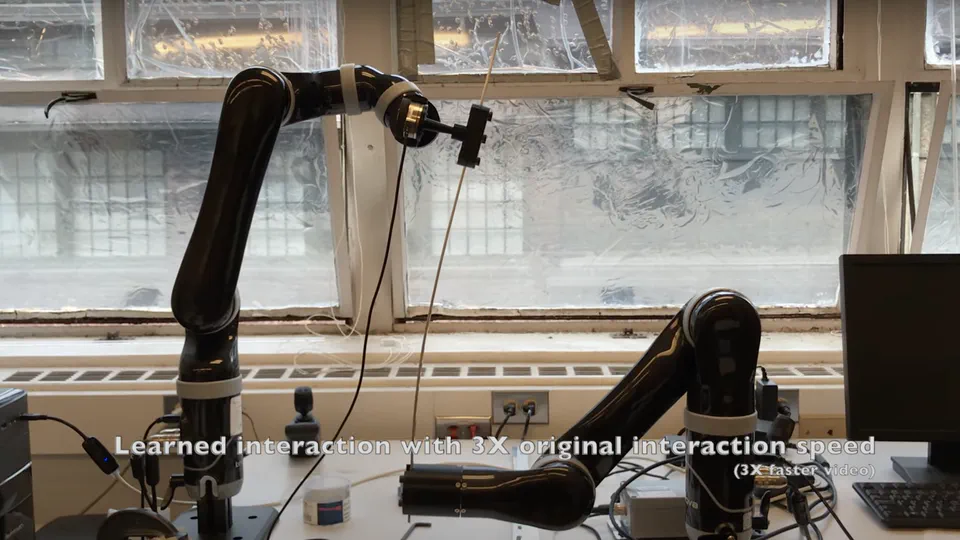
My research focuses on enabling seamless cooperation among robots in multi-agent systems. I investigated a novel decentralized control approach called Delayed Self-Reinforcement (DSR). This method allows robots to achieve greater cohesion by leveraging their existing onboard information, thus reducing the need for additional communication.
You can find more details in my publications. 😃