Accelerated-Gradient-Based Flexible-Object Transport With Decentralized Robot Teams
Abstract
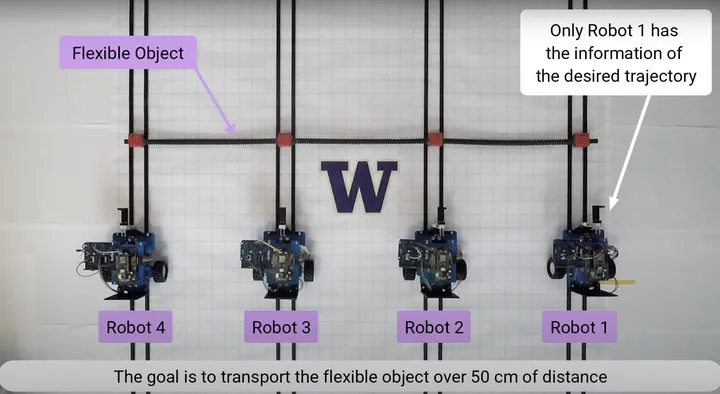
This letter addresses the rapid transport of flexible objects without increasing deformation, from one position to another, using a decentralized robotic team, rather than using a single large robot. However, current decentralized control theories do not ensure that the robot responses will remain cohesive (i.e., all robots move in a similar manner) during the transport process. This can lead to potentially large distortion, internal stress and damage when transporting sensitive objects. The main contribution of this work is to use an accelerated-gradient-based approach for faster transport without increasing the object deformation. Alternatively, for the same transport time, the approach allows the reduction of the object deformation. An advantage is that the proposed gradient-based approach can be implemented using an accelerated delayed self reinforcement (A-DSR) approach that requires only local force sensing by each robot, without additional inter-robot communication. Comparative experimental results, with and without A-DSR, show reduction in deformations by 60% for the same transport time, and a reduction of 59% in transport time for the same level of object deformation.
Type
Publication
IEEE Robotics and Automation Letters
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software.
Create your slides in Markdown - click the Slides button to check out the example.
Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.