Communication-Free Decentralized Controller Design for Flexible Object Transport
Jun 4, 2024·,,,,·
1 min read
Yoshua Gombo
Anuj Tiwari
Mohamed Safwat
Henry Chang
Santosh Devasia
Abstract
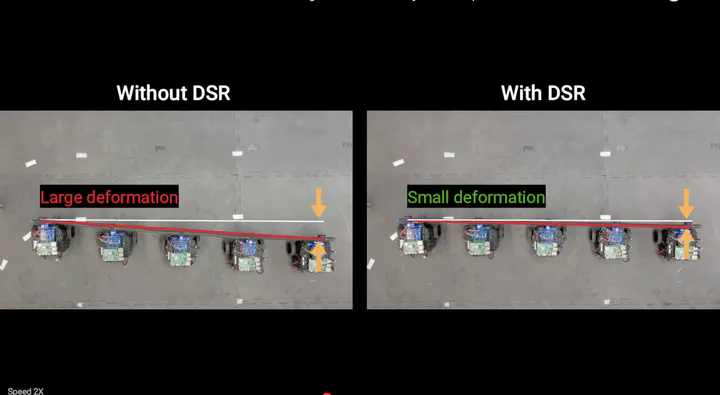
Bio-inspired decentralized approaches for transporting objects with robot networks seek to use locally-sensed information such as object–robot interaction forces, without the need for robot-to-robot communication. However, the design of the decentralized controller to achieve a specified network performance (e.g., to achieve a desired network settling time Ts) depends on the particular network/object connectivity and therefore, tends to be a centralized decision. Such centralized controller design is not biomimetic and might not be viable if communication is not available between agents to achieve decentralized consensus on the controller parameters. The main contribution of this article is a decentralized controller design approach using local measurements, which does not require prior knowledge of the robot network or object properties. Rather, only the desired network-level performance (such as network settling time) is needed to select controller parameters with the proposed delayed self-reinforcement (DSR) approach, which decentralizes the ideal case where each robot has information about the transport task. In addition, experimental results show that the DSR approach (with decentralized parameter selection) reduces deformation substantially by 66% for a linear object using mobile robots and by 57% for the planar transport of a cylindrical object using industrial robots, when compared to the standard (without DSR) case, even with a centralized design of parameters.
Type
Publication
IEEE/ASME Transactions on Mechatronics
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software.
Create your slides in Markdown - click the Slides button to check out the example.
Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.